1
ГИРОВЕРТИКАЛЬ
гирогоризонт,
гироскопическое устройство для определения направления истинной вертикали
или плоскости горизонта, а также углов наклона объекта относительно этой
плоскости. Простейшим негироскопич. прибором такого рода служит физич.
маятник (отвес). Однако он не пригоден для движущегося объекта, т. к. не
будет устанавливаться вдоль истинной вертикали при вращат. или ускоренном
постулат, движении объекта (он будет несколько отклоняться от вертикали
и при равномерном постулат, движении объекта вследствие вращения Земли);
кроме того, при качке у него могут возникнуть вынужденные колебания с большими
раз-махами. Г. в значит, мере свободна от этих недостатков и поэтому широко
применяется на самолётах, кораблях и др. движущихся объектах.
В качестве простейшей Г.
может служить трёхстепенной астатич. гироскоп, ось к-рого стремится сохранять
своё направление в мировом пространстве. Однако по отношению к вращающейся
Земле эта ось будет со временем изменять своё направление. Поэтому без
корректирующих устройств такой прибор может служить лишь кратковременным
указателем направления (в частности, вертикали). Подобные приборы, наз.
гирого-ризонтом и гировертикан-т о м, применяются в баллистич. ракете для
определения углов её отклонения в вертикальной и горизонтальной плоскостях
(углы тангажа, рыскания и крена). Для длит, удержания оси астатич. гироскопа
в вертикальном положении используют те или иные системы коррекции.
Г. с маятниковой системой
коррекции (рис. 1) - трёхстепенной астатич. гироскоп, в к-ром система коррекции
состоит из маятников-корректоров 4, 5, фиксирующих углы отклонения оси
гироскопа от вертикали места, и датчиков моментов 6, 7, прикладывающих
к гироскопу соответствующие корректирующие моменты, вызывающие прецессию
оси гироскопа к вертикали места. Потенциометры 5 и 9 служат для определения
углов наклона объекта относительно плоскости горизонта. Погрешности Г.
этого типа, определяемые отклонениями оси гироскопа от вертикали места,
могут составлять от долей градуса до единиц угловых минут. В прецизионных
Г. для повышения их точности учитываются поправки на вращение Земли и собственное
движение объекта.
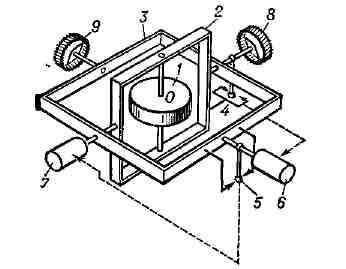
Рис. 1. Принципиальная схема гировертикали с маятниковой
коррекцией; 1 - ротор; 2,3 - внутреннее и наружное кар-доновы кольца; 4,
5 - маятники-корректоры; б, 7 -датчики моментов; 8, 9 - потенциометры.
При установке на корабле
Г. с маятниковой коррекцией определяют углы бортовой и килевой качки, а
на летат. аппарате - углы крена и тангажа. Применяются в системах автоматич.
стабилизации различных подвижных объектов, в успокоителях качки корабля,
для стабилизации летат. аппарата и др., а также для определения искривления
буровых скважин, шахт и т. п.
Другим типом Г., не требующим
применения системы коррекции, является гиромаятник, т. е. гироскоп с 3
степенями свободы, центр тяжести G к-рого лежит на оси ротора на нек-ром
расстоянии I от точки опоры О (рис. 2). При отклонении оси Oz гироскопа
от вертикали ось Oz под действием силы тяжести
ось Oz под действием силы тяжести
P начинает прецессировать вокруг  описывая
описывая
конус с вершиной в точке О. T. к. собственный кинетич. момент гироскопа
H очень велик, то период прецессии (где I = OG) также велик, что делает
прибор практически нечувствительным к колебаниям объекта. В реальном приборе
прецессионные колебания оси Oz погашаются спец. демпфером и ось Oz гироскопа
приходит в положение, лиз-кое к вертикали. Однако чтобы прибор обладал
необходимой точностью при ускоренном движении (маневрировании) объекта,
период T должен удовлетворять условию M. Шулера (быть равным периоду колебаний
математич. маятника, длина к-рого равна радиусу Земли), т. е. составлять
84,4 мин, что до сих пор практически осуществить не удалось. В реализованных
конструкциях T обычно
А Б В Г Д Е Ё Ж З И Й К Л М Н О П Р С Т У Ф Х Ц Ч Ш Щ Ъ Ы Ь Э Ю Я