1
ВЕРТОЛЁТ
летательный аппарат тяжелее воздуха с вертикальными взлётом и посадкой,
подъёмная сила в к-ром создаётся одним или неск. (чаще двумя) несущими
винтами. Слово "вертолёт" введено вместо иностр. "геликоптер". В. взлетает
вертикально вверх без разбега и совершает вертикальную посадку без пробега,
неподвижно "висит" над одним местом, допуская поворот вокруг вертикальной
оси в любую сторону, производит полёт в любом направлении со скоростями
от нуля до максимальной. При вынужденной остановке двигателей в полёте
В. может совершить планирующий спуск и посадку, нслользуя самовращение
(авторотацию) несущих винтов. Во избежание срыва потока с лопастей
и для увеличения скорости полёта нек-рые В. имеют небольшое крыло, разгружающее
несущие винты.
В зависимости
от способа уравновешивания реактивного момента несущего винта различают
В.: одновинтовые (с хвостовым винтом или с реактивным приводом несущего
винта), двухвинтовые (соосные; продольной схемы; с перекрещивающимися
осями несущих винтов; С поперечным расположением несущих винтов, или поперечной
схемы) и многовинтовые. Из них получили распространение В.:
одновинтовые с хвостовым винтом (без крыла и с крылом); двухвинтовые
соосные (рис. 1) и В. продольной схемы.
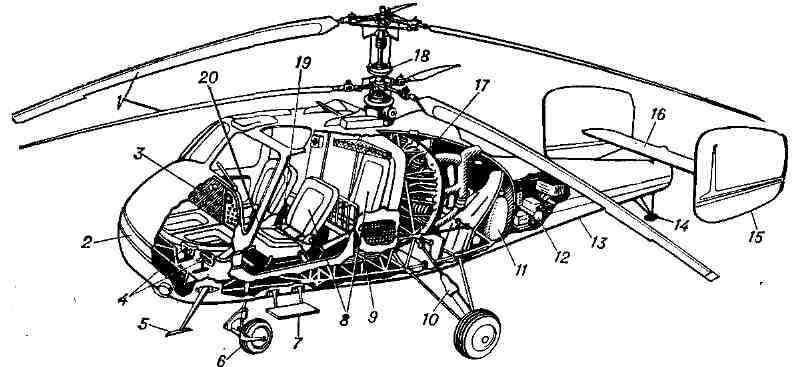
Рис. 1. Компоновочная
схема двухвинтового соосного вертолёта Ка-18: 1 - лопасти несущих винтов;
2 - носовая часть фюзеляжа; 3 - приборная доска; 4 - педали путевого управления;
5 - приёмник воздушного давления; 6 - переднее шасси; 7 - подножка; 8 -
кресла; 9 - передний бензиновый бак; 10 - главное шасси; 11 - задний бензиновый
бак; 12 - радиооборудование; 13 - хвостовая балка; 14 - хвостовая опора;
15 - вертикальное оперение; 16 - стабилизатор; 17 - двигатель; 18 - колонка
несущих винтов; 19 - рычаг управления двигателем и несущими винтами; 20
- ручка продольно-поперечного управления.
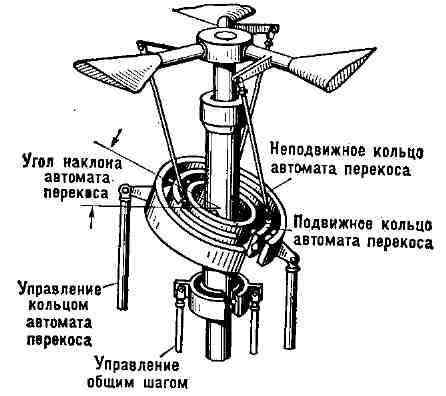
Рис. 2. Схема
автомата перекоса.
В. любой схемы
состоит из планёра, аналогичного самолётному (фюзеляж, шасси, органы управления,
электро-, радио- и навигационное оборудование и т. д.), винтовой
несущей системы (несущих винтов), двигательной (силовой) установки
(см. Вертолётный двигатель), трансмиссии (привода). Одновинтовые
В. с механич. приводом, кроме того, имеют хвостовой винт и систему управления
им.
Подавляющее
большинство конструкций несущих винтов В. выполнено с шарнирной подвеской
лопастей. Такая подвеска даёт возможность лопастям совершать маховое движение,
обеспечивающее балансировку В. во всём диапазоне скоростей полёта. В то
же время маховое движение лопастей ставит предел увеличению скорости полёта
В. св. 350 - 370 км/ч из-за срыва потока на них. В 1965 появились
В. амер. фирмы "Лок-хид" с бесшарнирными полужёсткими винтами, у к-рых
маховое движение концов лопастей осуществляется вследствие упругого изгиба
лопастей. В 60-е гг. 20 в. начались разработки конструкций жёстких винтов,
у к-рых практически устранено маховое движение. Такие винты могут быть
применены только в двухвинтовой соосной системе, обеспечивающей балансировку
и управление В. Жёсткие соосные винты, не имея срыва потока, позволят довести
скорость полёта до 500-600 км/ч. Основные три типа конструктивного
выполнения лопастей - смешанная конструкция со стальным трубчатым лонжероном;
цельнометаллич. конструкция с прессованным из алюминиевого сплава лонжероном;
цельносте-клопластиковая лопасть. Аэродинамич. компоновка лопасти зависит
от назначения В. и определяется условиями взлёта, значением макс, скорости
конца лопасти при макс, скорости полёта.
Управление
несущими винтами состоит из двух систем: циклического управления шагом
лопастей и управления общим шагом лопастей. Циклич. управление шагом лопастей
выполняется автоматом перекоса, изобретённым Б. Н. Юрьевым в 1911.
Автомат перекоса (рис. 2)
расположен
на оси винта и состоит из двух колец, подвешенных на кардане к неподвижной
опоре. Внутр. кольцо соединено с тягами продольного и поперечного управления;
внеш. кольцо - с тягами, управляющими лопастями. Под действием тяг управления
внутр. кольцо автомата перекоса наклоняется, вызывая синусоидальное изменение
углов установки лопастей в осевом шарнире и появление горизонтальной составляющей
тяги несущего винта, к-рая вызывает поступательное движение В. и наклоняет
его в сторону движения. Управление общим шагом лопастей осуществляется
одновременным поворотом их в осевом
шарнире относительно
продольной оси лопасти посредством рычагов и тяг и служит для изменения
вертикального режима полёта: при одновременном увеличении угла установки
всех лопастей В. поднимается; при одновременном уменьшении углов - опускается.
Продольное и поперечное управление В. осуществляется через автоматы перекоса;
путевое управление - изменением шага лопастей хвостового винта (на одновинтовых
В.) или одновременным изменением общего шага лопастей в противоположных
направлениях (на соосных В.). При переходе на режим безмоторного планирования
(режим самовращения несущих винтов) опусканием рычага общего шага уменьшают
угол установки лопастей до 3-50.
Наибольшего
развития вертолётострое-ние достигло в СССР (научно-конструкторские коллективы
под руководством М. Л. Миля и Н. И. Камова), в США (фирмы "Сикорский",
"Боинг", "Белл", "Каман"), Франции ("Сюд-авиасьон"), Англии
("Уэстленд") и Италии ("Агу-ста"). В. широко применяют в нар. х-ве СССР:
на работах по борьбе с с.-х. вредителями и болезнями садов, виноградников
и ценных технич. культур, а также по подкормке посевов (Ка-15, Ка-26, Ми-1,
Ми-2); для транспортных (Ми-4, Ми-6) и пассажирских (Ми-8) перевозок; при
проведении геологоразведочных работ (Ка-26); для гравиметрии, съёмки
(Ка-18); для разведки ледовой обстановки (Ми-1, Ка-15); для
патрулирования линий высокого напряжения, газо- и нефтепроводов (Ка-18,
Ка-26); для перевозки и монтажа крупногабаритного оборудования,
установки мачт и др. монтажных работ (Ми-10); для санитарных и спасат.
работ (Ка-18) и т. д.
В. входят в
состав вооружённых сил всех крупных государств и применяются в зависимости
от их назначения: для переброски тактич. возд. десантов, перевозки войск
и грузов, эвакуации с поля боя раненых и повреждённой боевой техники (военно-трансп.
В., рис. 3), для поражения огневых средств, открыто расположенной
живой силы и техники, а также постановки минно-взрывных противотанковых
и противопехотных заграждений и дымовых завес (В. непосредственной поддержки
войск); для поиска и уничтожения подводных лодок (противолодочные,
корабельные и базовые В.); для ведения радиационной, химической,
инж. разведки, наблюдения за полем боя и корректировки арт. огня (В. возд.
разведки). Кроме того, В. применяют для траления мин и буксировки
тралов, лодок и т. д.; для осуществления спасат. операций на море и на
суше; для обеспечения связи командования и в качестве возд. командных пунктов;
для наведения наплавных мостов и переправ через водные преграды; для постановки
радиопомех и т. д.
Серийное произ-во
отечеств. В. было начато в 1951 выпуском трёхместного В. Ми-1. В 1954 был
выпущен В. Ми-4, в 1958 - двухмоторный турбовинтовой В. Ми-6 (рис. 4)
с грузоподъёмностью, превышающей 6 т, и пассажировмести-мостью
70-80 чел., а в 1965 - В. Ми-10 (рис. 5). С 1953 по 1968 был налажен
серийный выпуск двухвинтовых соосных вертолётов Ка-10, Ка-15, Ка-18, Ка-25
(рис. 6), Ка-26 (рис. 7). В 1968 был создан самый грузоподъёмный
В. В-12 с поперечным расположением винтов (конструкции М. Л. Миля),
поднявший в марте 1969 коммерческий груз 31 130 кг на высоту 2950
м (о др. рекордах В. см. Вертолётный спорт). См. также Авиация.
Лит.: Изаксон
А. М., Геликоптеры, 2 изд., М., 1947; Камов Н. И., Винтовые летательные
аппараты, М., 1948; Братухин И. П., Проектирование и конструкции вертолетов,
М., 1955; Юрьев Б. Н., Аэродинамический расчет вертолетов, М., 1956; Изаксон
А. М., Советское верто-летостроение, М., 1964; Вертолеты, т. 1-2, М., 1966-67.
Н.И.Камов,
А Б В Г Д Е Ё Ж З И Й К Л М Н О П Р С Т У Ф Х Ц Ч Ш Щ Ъ Ы Ь Э Ю Я