1
АВТОПИЛОТ
(от авто... и франц. pi-lote - водитель), устройство для автоматич.
управления летат. аппаратом (самолётом, вертолётом, управляемым снарядом
и др.). Идея и схема А. были предложены К. Э. Циолковским в 1898.
Впервые полёт самолёта, автоматически управляемый А. фирмы Сперри (США),
был продемонстрирован на Всемирной выставке в Париже в 1914. Отечеств.
А. с пневматич. исполнит, системой (АВП-1) был создан в 1932. Первонач.
А. предназначался только для стабилизации угловых движений самолёта (движения
относительно центра масс), что давало возможность выдерживать заданный
режим полёта самолёта без участия лётчика. Усовершенствование А. позволило
создать автоматизиров. систему, к-рая производит управление летат. аппаратом
не только относительно его центра масс, но также и его центром масс. Это
дало возможность автоматизировать все режимы полёта летат. аппарата от
взлёта до посадки. Такие А. автоматически управляют и рулями летат. аппарата,
и его двигателями. Они делают возможными полёты различных классов беспилотных
летат. аппаратов (ракеты, самолёты-снаряды, искусств, спутники Земли и
т. д.).
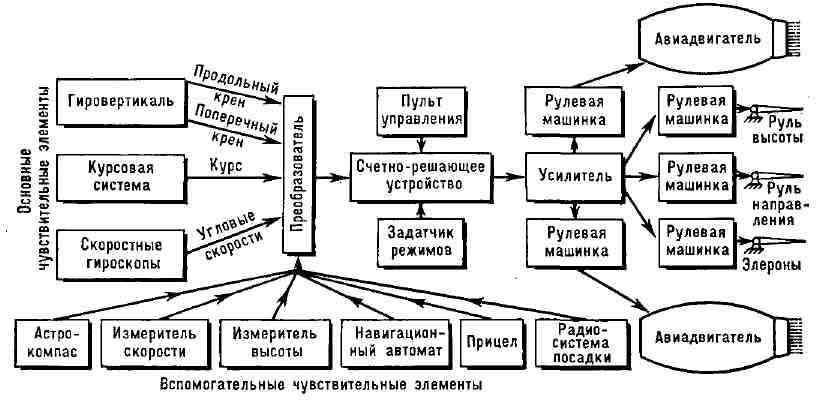
А. на самолёте
состоит из ряда подобных по принципу действия автоматов (курса, продольно-поперечных
кренов, скорости, высоты и др.), совместная работа к-рых управляет
полётом и стабилизует его (рис.). Чувствит. элемент каждого автомата
измеряет один, определённый для него параметр режима полёта (напр., или
высоту, или курс), наз. параметром регулирования, и вырабатывает
сигнал, пропорциональный текущему значению параметра. Задатчик режимов
полёта вырабатывает сигналы, каждый из к-рых соответствует требуемому значению
определ. параметра регулирования. Эти сигналы сравниваются в вычислит,
устройстве. Их разность (рассогласование) после усиления поступает
на рулевую машинку А., отклоняющую соответствующий
руль самолёта или орган управления двигателем. Так происходит изменение
режима полёта. Когда этот режим достигает заданного, сигнал рассогласования
исчезает, рулевая машинка прекращает движение и наступает положение равновесия.
Устойчивость систем автоматич. управления летат. аппаратами достигается
как регулированием по производным от регулируемых параметров, так и отрицат.
обратной связью соответств. видов. Кроме автоматов, в А. входят системы
управления и регулировки. Необходимую для работы А. энергию в виде электроэнергии
или воздуха и масла под давлением доставляет двигатель самолёта.
Лит.: Боднер
В. А., Теория автоматического управления полётом, М., 1964.
А.Л.Горелик.
А Б В Г Д Е Ё Ж З И Й К Л М Н О П Р С Т У Ф Х Ц Ч Ш Щ Ъ Ы Ь Э Ю Я